Pipeline Overview
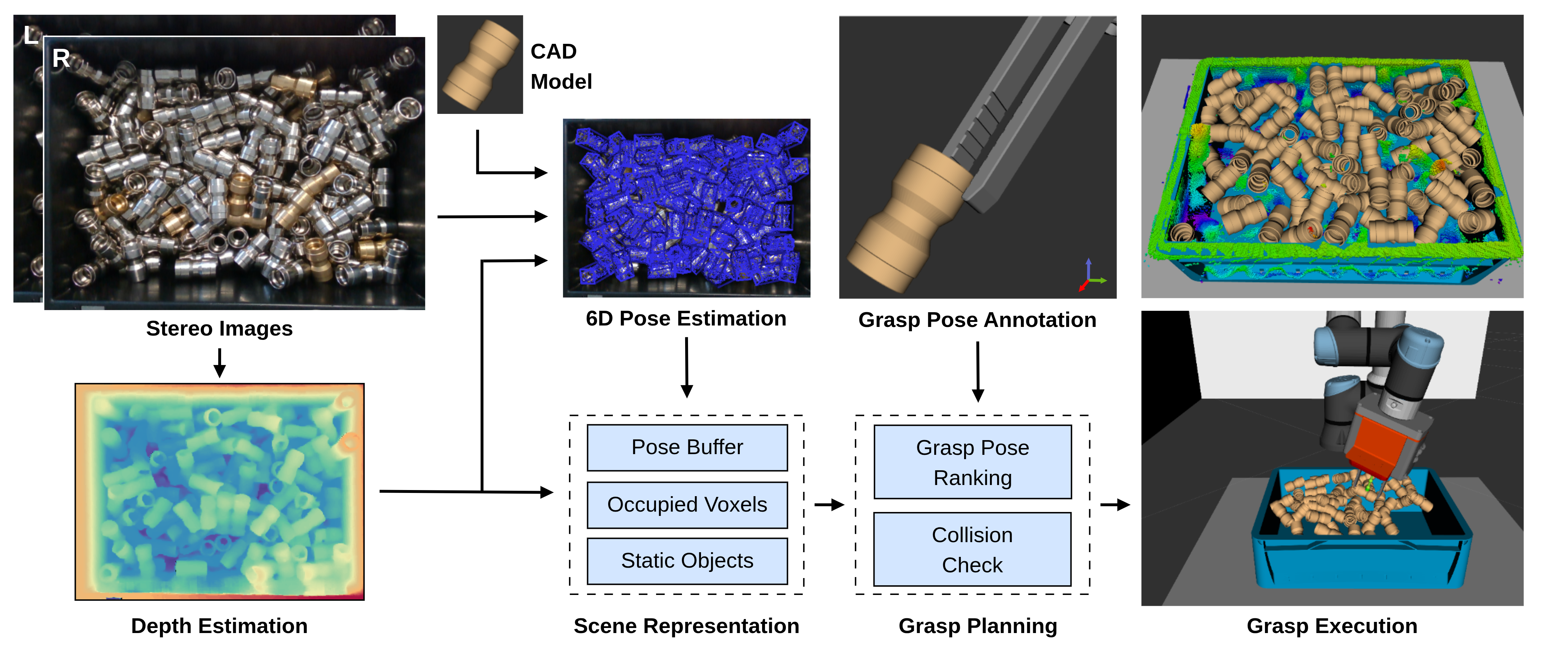
Pickalo follows a modular architecture integrating state-of-the-art perception and planning components. A stereo-pair image is acquired and processed by a depth estimation block (BridgeDepth) to obtain enhanced depth. The resulting depth is aligned to the RGB frame and provided to the SAM-6D pose estimator together with the object CAD model. A Pose Buffer fuses multi-view pose estimates over time, handling symmetries and filtering unreliable detections. The scene state—composed of target objects, static objects (bin, table), and occupied voxels—is then used by the grasp planner, which ranks pre-computed antipodal grasp candidates and performs fast collision checking to find a feasible extraction trajectory.